|
|
Descri��o do Projeto:
O projeto utiliza um microcontrolador PIC 16F877A que atrav�s de seus PWMs, realiza o controle da corrente que passa pelo resistor, e o controle de velocidade do cooler que ira resfriar o resistor.
Para supervisionar esse processo de controle, foi criada uma interface gr�fica no Borland Builder.
As tr�s etapas do projeto s�o:
- Manual:
A primeira etapa do projeto tem como objetivo o controle manual da temperatura, onde o usu�rio pode controlar os dois PWMs do modo que desejar, por exemplo, ele pode ligar os dois ao mesmo tempo ou apenas ligar o resistor e deixar o cooler desligado ou vice-e-versa.
- On-Off:
Na segunda etapa do projeto o usu�rio pode controlar apenas um dos dois PWMs, ou seja, se ele optar por colocar o resistor como autom�tico o cooler estar� livre para seu controle, ou se ele escolher o cooler como autom�tico, o resistor poder� ser controlado. Al�m disso, o usu�rio entrara com um valor de temperatura desejado, um valor m�ximo e um valor m�nimo para que o PWM que estiver no modo autom�tico seja setado, e um valor de histerese.
- PID:
Na terceira e ultima etapa o processo de controle, o cooler trabalhara no modo autom�tico. O usu�rio entrara com um valor desejado de temperatura, ganho (K), tempo integral (Ti) e tempo derivativo (Td), e o microcontrolador ir� ajustar o valor de PWM at� que o sistema se estabilize no set-point (temperatura que usu�rio definiu). O per�odo de amostragem utilizado � de T = 300ms.
Na figura 1 temos as equa��es de K, Ti e Td
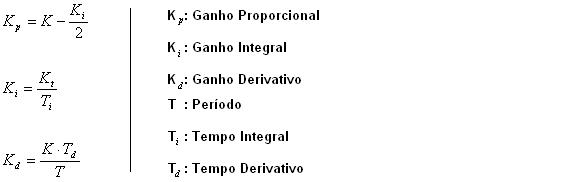
Figura 1
J� na figura 2 temos a equa��o implementada no PID

Figura 2
Um exemplo de aplica��o do controle envolvendo o PID � em esteiras de supermercado ou escadas rolantes que utilizam um sistema para manter a velocidade constante. Nestes casos a vari�vel de controle � a velocidade.
Na figura 3 temos um diagrama de blocos do projeto:
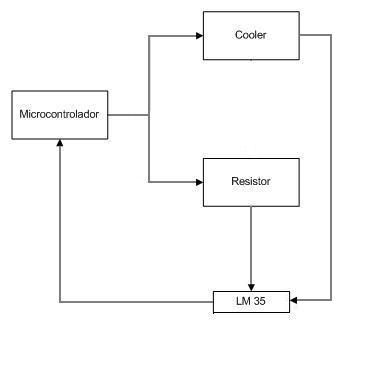
Figura 3
A figura 4 mostra o sistema de controle em malha fechada onde a realimenta��o � o pr�prio erro:
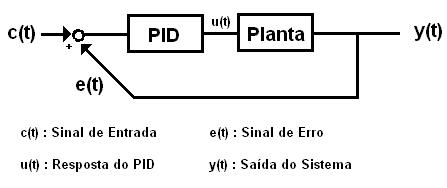
Figura 4
E a figura 5 mostra o diagrama de liga��es:

Figura 5
Dificuldades do Projeto:
Como todo o circuito (transistores, LM e cooler) � alimentado por uma �nica fonte, e o chaveamento feito pelos transistores � muito r�pido, com uma corrente de at� 1,5 A, isso gera um ru�do na pr�pria alimenta��o, que acaba interferindo na sa�da do LM, afetando o valor lido na sua sa�da.
J� na parte de software, algumas problemas na parte da implementa��o do PID foram encontrados.
Uma poss�vel solu��o por software, seria criar uma janela com alguns valores lidos do sensor de temperatura e fazer uma m�dia, logo em seguida descartar o valor ultimo valor e pegar um novo valor para que se tenha uma nova m�dia, e assim sucessivamente. Assim ter�amos uma temperatura m�dia, que teria um erro menor.
|